
Oscylator to układ elektroniczny, który samodzielnie generuje okresowy sygnał elektryczny, zwykle z energii zasilania DC. Do powstania drgań potrzebne są: element ustalający częstotliwość, dodatnie sprzężenie zwrotne albo mechanizm ujemnej rezystancji, zapas wzmocnienia na starcie oraz nieliniowy mechanizm ograniczający amplitudę. W idealnym opisie oscylator ma stałą częstotliwość i amplitudę, ale rzeczywisty układ ma tolerancję, dryft, jitter, phase noise, czas startu i ograniczoną odporność na obciążenie.
W elektronice oscylator nie jest tylko „źródłem sygnału”. To układ, który musi spełnić warunek fazy i wzmocnienia, skompensować straty w pętli oraz ustalić amplitudę bez niekontrolowanego wzrostu drgań. Dlatego przy dokładniejszym opisie trzeba rozróżnić oscylator, rezonator, gotowy moduł zegarowy, VCO, PLL i sam element częstotliwościowo-selektywny.
Co to jest oscylator?
Oscylator jest aktywnym źródłem sygnału okresowego. Może generować sinusoidę, przebieg prostokątny, przebieg zegarowy, sygnał RF albo sygnał odniesienia dla mikrokontrolera. Częstotliwość może wynikać ze stałej czasowej RC, rezonansu LC, rezonatora kwarcowego, opóźnienia bramek logicznych albo napięcia sterującego.
Oscylator najczęściej korzysta z energii zasilania stałego, więc jego działanie łączy się z podstawami obwodów opisanych w dziale prąd stały DC. Zasilanie nie jest jednak sygnałem wyjściowym. Układ aktywny przekształca energię zasilania w drgania o określonej częstotliwości.
Podstawowe zależności między okresem i częstotliwością są następujące:
f=\frac{1}{T} \omega=2\pi fgdzie f oznacza częstotliwość, T okres, a \omega pulsację. Im krótszy okres jednego cyklu, tym większa częstotliwość sygnału.
Oscylator, generator, rezonator i kwarc — czym się różnią?
W opisach elementów te pojęcia często są mieszane. To prowadzi do błędów projektowych, bo sam rezonator nie jest jeszcze oscylatorem, a gotowy moduł XO nie jest tym samym co kwarc podłączony do mikrokontrolera.
| Pojęcie | Co oznacza? | Przykład |
|---|---|---|
| Oscylator | Aktywny układ sam generujący okresowy sygnał. | Pierce, Wien, Colpitts, ring oscillator. |
| Generator | Szersze określenie źródła sygnału. | Generator funkcyjny, generator PWM, generator zegarowy. |
| Rezonator | Element wybierający częstotliwość lub wprowadzający selektywność. | Kwarc, rezonator ceramiczny, obwód LC. |
| Kwarc | Rezonator piezoelektryczny, a nie kompletny oscylator. | 16 MHz, 8 MHz, 32,768 kHz. |
| XO | Gotowy moduł oscylatora z wyjściem logicznym lub sinusoidalnym. | 25 MHz CMOS oscillator. |
| VCO | Oscylator sterowany napięciem. | PLL, synteza częstotliwości, modulacja FM. |
| TCXO | Oscylator kwarcowy z kompensacją temperaturową. | GPS, radio, moduły komunikacyjne. |
| OCXO | Oscylator kwarcowy w termostacie. | Wzorce czasu, pomiary, systemy telekomunikacyjne. |
Rezonator ustala warunki częstotliwościowe, ale nie dostarcza energii do podtrzymania sygnału. Oscylator musi mieć element aktywny, który kompensuje straty rezonatora albo sieci RC/LC. Dlatego kwarc 16 MHz podłączony do pinów MCU i gotowy moduł XO 16 MHz to dwa różne rozwiązania.
Warunek Barkhausena, start i stabilizacja amplitudy
Klasyczny opis oscylatora ze sprzężeniem zwrotnym używa warunku Barkhausena. Dla pętli z wzmocnieniem A(j\omega) i transmitancją sprzężenia \beta(j\omega) zapisuje się:
A(j\omega)\beta(j\omega)=1czyli osobno warunek amplitudy:
|A(j\omega)\beta(j\omega)|=1oraz warunek fazy:
\angle\left[A(j\omega)\beta(j\omega)\right]=2\pi kgdzie k jest liczbą całkowitą. Warunek fazy oznacza, że sygnał po przejściu przez pętlę wraca zgodnie z samym sobą, a nie jako sygnał tłumiący drgania.
Start drgań: dlaczego |A\beta| musi być większe od 1?
W stanie ustalonym wzmocnienie pętli dąży do jedności, ale podczas startu musi być większe niż jeden. Inaczej drobny sygnał początkowy nie narasta. Po włączeniu zasilania w układzie pojawiają się szum termiczny, stany przejściowe i zakłócenia. Jeżeli pętla wzmacnia wybraną składową częstotliwościową i zawraca ją z poprawną fazą, amplituda drgań rośnie.
|A\beta|>1\quad\text{podczas startu} |A\beta|=1\quad\text{po ustaleniu amplitudy}To jest powód, dla którego oscylator może wyglądać poprawnie na schemacie, ale nie startować po zmianie partii kwarców, temperatury, napięcia zasilania albo tolerancji kondensatorów. W fazie rozruchu potrzebny jest zapas, nie tylko spełnienie warunku stanu ustalonego.
Nieliniowość: dlaczego oscylator nie rośnie w nieskończoność?
Gdy amplituda rośnie, układ aktywny wchodzi w zakres nieliniowy. Tranzystor, wzmacniacz operacyjny, inwerter CMOS albo inny element aktywny zaczyna ograniczać prąd, transkonduktancję lub napięcie wyjściowe. Efektywne wzmocnienie pętli maleje, aż energia dostarczana z zasilania równoważy straty w pętli.
W mostku Wiena amplitudę można stabilizować żarówką, diodami albo układem automatycznej regulacji wzmocnienia. W oscylatorze LC ograniczenie wynika często z nieliniowości tranzystora. W oscylatorze pierścieniowym amplituda jest ograniczona poziomami logicznymi. W oscylatorze kwarcowym aktywna gałąź kompensuje straty rezonatora, ale zbyt duży poziom pobudzenia może pogarszać starzenie kwarcu albo przekraczać dopuszczalny drive level.
Jeżeli w układzie analogowym używa się diod do ograniczania amplitudy albo warikapu do przestrajania częstotliwości, temat łączy się z elementami opisanymi w hasłach dioda oraz dioda pojemnościowa, czyli warikapowa.
Rodzaje oscylatorów: RC, LC, kwarcowe, pierścieniowe i VCO
Rodzaj oscylatora zależy od tego, co ustala częstotliwość: stała czasowa RC, rezonans LC, rezonator kwarcowy, opóźnienie bramek logicznych albo napięcie sterujące. Każdy typ ma inne ograniczenia dokładności, szumu, poboru prądu, zakresu częstotliwości i odporności na temperaturę.
| Typ oscylatora | Co ustala częstotliwość? | Zalety | Ograniczenia |
|---|---|---|---|
| RC | Stała czasowa RC. | Prosty, tani, łatwy do integracji w układach scalonych. | Słaba dokładność i stabilność temperaturowa. |
| Mostek Wiena | Sieć RC z selektywnym sprzężeniem zwrotnym. | Może dawać bardzo czystą sinusoidę w zakresie audio. | Wymaga stabilizacji amplitudy. |
| RC phase-shift | Przesunięcie fazy w kaskadzie RC. | Prosty analogowy generator sinusoidalny. | Umiarkowana stabilność, ograniczony zakres częstotliwości. |
| LC | Rezonans cewki i kondensatora. | Dobry dla RF, filtrów i układów przestrajanych. | Wrażliwy na pasożyty, tolerancje i dobroć Q. |
| Colpitts / Hartley | Obwód LC z dzielnikiem pojemnościowym lub indukcyjnym. | Klasyczne układy RF. | Wymagają starannego projektu i kontroli sprzężenia. |
| Pierce crystal | Rezonator kwarcowy z inwerterem lub wzmacniaczem. | Dobra dokładność i stabilność. | Dobór C_L, ESR, layout i zapas startu. |
| Ring oscillator | Opóźnienie nieparzystej liczby inwerterów. | Bardzo prosty w układach scalonych. | Duży jitter, silna zależność od procesu, napięcia i temperatury. |
| VCO | Napięcie sterujące. | PLL, synteza częstotliwości, modulacja. | Phase noise, zakres strojenia, liniowość sterowania. |
| XO / TCXO / OCXO | Gotowy moduł zegarowy. | Przewidywalne parametry, łatwiejszy projekt. | Koszt, pobór mocy, czas startu, dostępność. |
Oscylatory RC i LC są blisko związane z obwodami selektywnymi częstotliwościowo. Przy ich analizie przydają się podstawy opisane w tekstach o filtrach elektrycznych, obwodach RLC oraz rezonansie napięć i prądów.
Podstawowe wzory dla oscylatorów RC, LC i pierścieniowych
Dla wielu oscylatorów RC częstotliwość jest związana ze stałą czasową RC. W ujęciu ogólnym:
f\sim\frac{1}{RC}Dla klasycznego mostka Wiena z równymi elementami:
f_0=\frac{1}{2\pi RC}Takie układy często wykorzystują wzmacniacz operacyjny, dlatego ich projekt łączy się z podstawami opisanymi w artykule o wzmacniaczach operacyjnych.
Dla idealnego obwodu rezonansowego LC:
f_0=\frac{1}{2\pi\sqrt{LC}}Przykład: dla L=10\ \mu\mathrm{H} i C=100\ \mathrm{pF}:
f_0=\frac{1}{2\pi\sqrt{10\cdot10^{-6}\cdot100\cdot10^{-12}}}\approx5{,}03\ \mathrm{MHz}W oscylatorze LC częstotliwość zależy od cewki i kondensatora, ale realny układ ma także pojemności pasożytnicze, rezystancję uzwojenia, straty rdzenia i dobroć Q. Dlatego temat łączy się z tym, jak działa cewka indukcyjna.
Dla oscylatora pierścieniowego z N stopniami i opóźnieniem pojedynczego stopnia t_p:
f\approx\frac{1}{2Nt_p}Taki oscylator jest łatwy do zintegrowania w układzie scalonym, ale jego częstotliwość mocno zależy od procesu technologicznego, napięcia zasilania i temperatury. To dobre rozwiązanie do prostych zegarów wewnętrznych, ale nie do precyzyjnego taktowania RF albo dokładnego RTC.
Oscylator kwarcowy: rezonator, ESR i pojemność obciążenia
Oscylator kwarcowy jest jednym z najważniejszych źródeł częstotliwości w elektronice. Kwarc nie jest aktywnym generatorem. Jest rezonatorem piezoelektrycznym: pole elektryczne powoduje odkształcenie mechaniczne kryształu, a drganie mechaniczne daje odpowiedź elektryczną. Układ aktywny musi ten rezonator pobudzić, skompensować straty i utrzymać drgania.
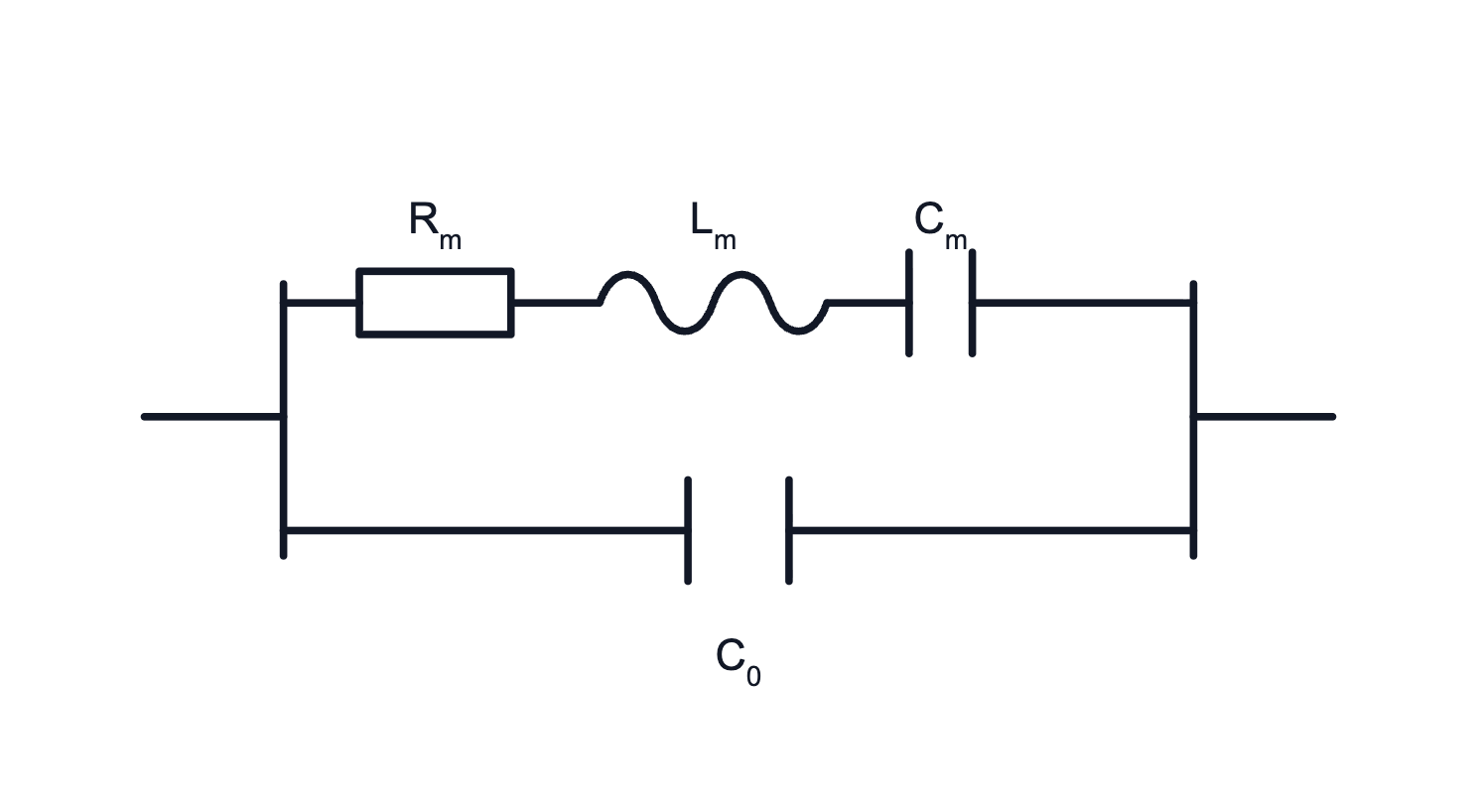
Klasyczny elektryczny model zastępczy kwarcu, często opisywany jako model Butterwortha-Van Dyke’a, zawiera gałąź ruchową oraz pojemność statyczną elektrod i obudowy.
| Element modelu | Znaczenie |
|---|---|
| L_m | Indukcyjność ruchowa związana z mechaniczną bezwładnością rezonatora. |
| C_m | Pojemność ruchowa związana ze sprężystością układu mechanicznego. |
| R_m | Straty mechaniczne i elektryczne, często widziane jako ESR. |
| C_0 | Pojemność statyczna elektrod, obudowy i struktury rezonatora. |
W oscylatorach kwarcowych mikrokontrolerów często spotyka się układ Pierce’a. Z zewnątrz wygląda prosto: rezonator, dwa kondensatory i wejście/wyjście oscylatora MCU. Elektrycznie jest to pętla, która musi mieć odpowiednią ujemną rezystancję, zapas startu i poprawnie dobraną pojemność obciążenia.
Pojemność obciążenia kwarcu
Dwa kondensatory przy kwarcu tworzą razem z pojemnościami pasożytniczymi efektywną pojemność obciążenia widzianą przez rezonator. Jeżeli ta pojemność różni się od wartości wymaganej przez producenta kwarcu, częstotliwość pracy przesuwa się od nominalnej.
Dla typowego układu Pierce’a efektywna pojemność obciążenia wynosi:
C_L=\frac{C_{L1}C_{L2}}{C_{L1}+C_{L2}}+C_{\mathrm{stray}}gdzie C_{L1} i C_{L2} to kondensatory przy kwarcu, a C_{\mathrm{stray}} obejmuje pojemność pinów, ścieżek PCB, pól lutowniczych i wejścia układu scalonego.
Dla równych kondensatorów C_{L1}=C_{L2}=C:
C_L\approx\frac{C}{2}+C_{\mathrm{stray}}czyli:
C\approx2(C_L-C_{\mathrm{stray}})Przykład: kwarc wymaga C_L=12{,}5\ \mathrm{pF}, a pojemność pasożytnicza płytki i pinów wynosi około 3\ \mathrm{pF}. Wtedy:
C\approx2(12{,}5-3)=19\ \mathrm{pF}Ostateczny dobór trzeba sprawdzić z dokumentacją rezonatora, dokumentacją mikrokontrolera oraz pomiarem częstotliwości. Pojemność obciążenia wpływa nie tylko na start, ale też na przesunięcie częstotliwości, czyli tzw. crystal pulling.
ESR, drive level i zapas startu oscylatora kwarcowego
ESR rezonatora oznacza skuteczne straty, które musi pokonać układ aktywny. Jeżeli ESR jest zbyt duże albo układ oscylatora ma zbyt mały zapas startu, drgania mogą nie narosnąć w całym zakresie temperatury, napięcia zasilania i tolerancji elementów.
W dokumentacjach producentów mikrokontrolerów pojawia się pojęcie ujemnej rezystancji pętli albo startup margin. Chodzi o to, czy aktywna część oscylatora jest w stanie skompensować straty rezonatora z wystarczającym zapasem. Dla wybranych rodzin MCU ST zaleca sprawdzanie stosunku ujemnej rezystancji pętli do maksymalnego ESR kwarcu; dla HSE zalecany margines jest większy niż dla LSE.
Oscylator kwarcowy ma ruszyć nie tylko na biurku przy 25°C. Ma ruszyć po produkcji, po latach starzenia, przy tolerancjach kondensatorów, przy innym napięciu zasilania i w temperaturze granicznej. Dlatego zapas startu jest parametrem projektowym, a nie akademicką ciekawostką.
| Parametr kwarcu / oscylatora | Co oznacza? | Dlaczego ważny? |
|---|---|---|
| Frequency tolerance | Odchyłka początkowa częstotliwości, np. ±20 ppm. | Określa błąd już w temperaturze odniesienia. |
| Frequency stability | Zmiana częstotliwości z temperaturą. | Ważna w urządzeniach pracujących poza pokojem laboratoryjnym. |
| Aging | Zmiana częstotliwości w czasie. | Istotna w zegarach, pomiarach i systemach długoterminowych. |
| ESR | Skuteczne straty rezonatora. | Wpływa na start oscylatora i wymagany zapas pętli. |
| C_L | Wymagana pojemność obciążenia. | Wpływa na częstotliwość pracy kwarcu. |
| Drive level | Moc pobudzania rezonatora. | Zbyt duży poziom może pogarszać starzenie albo uszkodzić rezonator. |
| Startup time | Czas narastania stabilnych drgań. | Krytyczny w low-power, RTC i urządzeniach bateryjnych. |
| Pullability | Podatność częstotliwości na zmianę pojemności obciążenia. | Ważna w VCXO i przy błędnie dobranych kondensatorach. |
| Phase noise / jitter | Stabilność krótkoterminowa sygnału. | Istotna dla RF, ADC, DAC, PLL i szybkich interfejsów. |
Na pracę oscylatora wpływa też zasilanie. Szum zasilania może modulować aktywny element i przenosić się na jitter lub phase noise. Dlatego w układach zegarowych liczą się odsprzęganie, masa, prowadzenie ścieżek i stabilne źródło zasilania. Ten fragment łączy się z tym, czym jest stabilizator napięcia.
Dokładność, stabilność, ppm, drift i aging
Oscylator może mieć poprawną częstotliwość nominalną, a mimo to nie być wystarczająco dokładny. Trzeba rozróżnić błąd początkowy, zmianę z temperaturą, starzenie, krótkoterminowy jitter i szum fazowy.
| Parametr | Co oznacza? | Przykład interpretacji |
|---|---|---|
| ±20 ppm | Odchyłka 20 części na milion. | Przy 10 MHz to ±200 Hz. |
| Stability | Zmiana częstotliwości z temperaturą. | np. ±30 ppm w określonym zakresie temperatury. |
| Aging | Zmiana częstotliwości z czasem. | np. kilka ppm rocznie. |
| Jitter | Błąd położenia zboczy w czasie. | Istotny dla ADC, PLL, DAC i interfejsów cyfrowych. |
| Phase noise | Szum fazowy w dziedzinie częstotliwości. | Istotny dla RF, PLL i modulacji. |
| Startup time | Czas osiągania stabilnych drgań. | Ważny w low-power i RTC. |
| Duty cycle | Stosunek czasu stanu wysokiego do okresu. | Ważny dla zegarów cyfrowych i układów taktowanych zboczem. |
Odchyłkę częstotliwości w ppm można przeliczyć na herce:
\Delta f=f_0\cdot\frac{\mathrm{ppm}}{10^6}Dla oscylatora 16 MHz i tolerancji 20 ppm:
\Delta f=16\cdot10^6\cdot\frac{20}{10^6}=320\ \mathrm{Hz}Dla zegarka z kwarcem 32,768 kHz i 20 ppm:
\Delta f=32768\cdot\frac{20}{10^6}\approx0{,}655\ \mathrm{Hz}Błąd czasu na dobę można oszacować tak:
\Delta t_{\mathrm{doba}}\approx86400\cdot\frac{\mathrm{ppm}}{10^6}Dla 20 ppm:
\Delta t_{\mathrm{doba}}\approx86400\cdot20\cdot10^{-6}=1{,}728\ \mathrm{s}PPM mówi o błędzie częstotliwości średniej albo wolnej stabilności. Nie mówi bezpośrednio o krótkoterminowej niepewności czasu zbocza. Oscylator może mieć dobrą tolerancję ppm, a jednocześnie zbyt duży jitter dla szybkiego ADC, DAC, radia albo interfejsu wysokiej prędkości.
Jitter i phase noise
Idealny oscylator dawałby zbocza dokładnie co T sekund. Rzeczywisty oscylator ma krótkoterminowe odchylenia czasu zboczy. To jest jitter. Ten sam problem można opisywać w dziedzinie częstotliwości jako phase noise, czyli szum fazowy wokół częstotliwości nośnej.
| Problem | Dziedzina | Gdzie boli? |
|---|---|---|
| Jitter | Czas | ADC, DAC, próbkowanie, interfejsy cyfrowe, zegary procesorów. |
| Phase noise | Częstotliwość | RF, PLL, synteza częstotliwości, modulacje cyfrowe. |
| Drift | Wolna zmiana częstotliwości | RTC, pomiary czasu, długie pomiary. |
| Aging | Zmiana w czasie | Wzorce, kalibracja, systemy pomiarowe. |
Jitter zegara może ograniczyć realne SNR przetwornika ADC. Dla sygnału wejściowego o częstotliwości f_{\mathrm{in}} i jittera RMS \sigma_t można oszacować:
SNR_{\mathrm{jitter}}\approx -20\log_{10}(2\pi f_{\mathrm{in}}\sigma_t)Przykład: f_{\mathrm{in}}=10\ \mathrm{MHz} oraz \sigma_t=1\ \mathrm{ps}:
SNR_{\mathrm{jitter}}\approx -20\log_{10}(2\pi\cdot10^7\cdot10^{-12})\approx84\ \mathrm{dB}Wniosek jest ważny: nawet bardzo dokładna średnia częstotliwość nie gwarantuje dobrego zegara do przetwornika, radia albo szybkiej transmisji. Krótkoterminowa stabilność fazy może być ważniejsza niż sama tolerancja ppm.
Przy ocenie zniekształceń, harmonicznych i widma sygnału warto połączyć ten temat z podstawami analizy Fouriera w elektronice. Oscylator sinusoidalny, prostokątny i taktujący mają różne widmo, a zbocza sygnału zegarowego wnoszą składowe wysokoczęstotliwościowe.
VCO, VCXO i PLL
VCO, czyli voltage-controlled oscillator, to oscylator sterowany napięciem. Jego częstotliwość zmienia się pod wpływem napięcia sterującego. Uproszczony zapis:
f_{\mathrm{out}}=f_{\mathrm{free}}+K_{\mathrm{VCO}}U_{\mathrm{ctrl}}gdzie f_{\mathrm{free}} oznacza częstotliwość swobodną, K_{\mathrm{VCO}} czułość VCO, a U_{\mathrm{ctrl}} napięcie sterujące.
VCXO to odmiana oscylatora kwarcowego o niewielkim zakresie przestrajania. Nie jest tak szeroko przestrajany jak typowy VCO, ale korzysta ze stabilności rezonatora kwarcowego. W układach RF i zegarowych często pracuje w pętli PLL.
PLL, czyli phase-locked loop, nie jest pojedynczym oscylatorem. To pętla synchronizacji fazowej, która porównuje fazę sygnału odniesienia z sygnałem sprzężenia zwrotnego i steruje VCO albo innym źródłem częstotliwości.
| Blok PLL | Funkcja |
|---|---|
| Reference oscillator | Dostarcza wzorzec częstotliwości. |
| Phase detector | Porównuje fazę sygnału odniesienia i sygnału z pętli. |
| Loop filter | Wygładza sygnał błędu i ustala dynamikę pętli. |
| VCO | Generuje częstotliwość wyjściową sterowaną napięciem. |
| Divider | Dzieli częstotliwość w pętli sprzężenia zwrotnego. |
PLL może ustabilizować częstotliwość względem wzorca, ale nie usuwa szumu. Szum referencji, VCO, dzielników i filtra pętli trzeba analizować w określonym paśmie. Dlatego w systemach radiowych phase noise oscylatora i PLL wpływa na jakość modulacji. Ten temat łączy się z modulacjami cyfrowymi, np. PSK i QPSK oraz QAM.
Oscylator w mikrokontrolerze
Mikrokontroler może być taktowany z wewnętrznego oscylatora RC, rezonatora ceramicznego, kwarcu, zewnętrznego wejścia zegarowego albo gotowego modułu XO. Wybór źródła zegara wpływa na dokładność czasu, działanie UART, USB, radia, RTC, pomiarów i trybów oszczędzania energii.
Wewnętrzny RC jest tani, szybki w starcie i nie wymaga elementów zewnętrznych, ale ma gorszą tolerancję i silniejszą zależność od temperatury oraz napięcia zasilania. Kwarc jest dokładniejszy, lecz wymaga poprawnego dobrania pojemności obciążenia, sprawdzenia ESR, poprawnego layoutu i czasu startu.
Kwarc 32,768 kHz jest często używany dla RTC i trybów low-power. Startuje wolniej niż kwarce megahercowe i wymaga ostrożnego prowadzenia ścieżek, bo pracuje z małymi poziomami energii. Zegar MHz służy zwykle do taktowania CPU, peryferiów, USB, RF i szybkich interfejsów.
W projektach opartych o Arduino wybór źródła zegara wpływa na czas, komunikację i stabilność pracy programu. Podstawowy kontekst znajdziesz w tekstach podstawy Arduino dla początkujących oraz programowanie Arduino. Sygnały na pinach mikrokontrolera, np. przełączanie wyjścia albo PWM, są wykonywane względem zegara systemowego, więc temat łączy się też z hasłem digital pin.
Dokładność zegara może być mało istotna przy miganiu LED, ale krytyczna przy USB, radiu, precyzyjnym pomiarze czasu, transmisji szeregowej albo protokołach low-power. W układach radiowych odchyłka zegara może przekładać się na odchyłkę częstotliwości nośnej, pogorszenie odbioru albo niespełnienie wymagań systemowych.
Pomiar oscylatora i wpływ PCB
Oscylator jest wrażliwy na obciążenie pomiarowe. Podłączenie sondy oscyloskopowej bezpośrednio do pinu kwarcu może zmienić pojemność obciążenia, przesunąć częstotliwość albo zatrzymać drgania. Dotyczy to zwłaszcza oscylatorów 32,768 kHz i wejść zegarowych mikrokontrolera.
Jeżeli trzeba sprawdzić zegar, lepiej użyć wyprowadzenia clock-out, bufora, sondy o małej pojemności wejściowej albo metody zalecanej przez producenta mikrokontrolera. Sam fakt, że oscylator przestaje działać po dotknięciu sondą, nie musi oznaczać uszkodzenia układu. Często oznacza, że pomiar zmienił warunki pracy pętli.
Layout przy kwarcu powinien minimalizować pętle prądowe, pojemności pasożytnicze, sprzęganie z szybkimi liniami cyfrowymi i szumem zasilania. Ścieżki do rezonatora powinny być krótkie i możliwie symetryczne, a elementy obciążające blisko pinów oscylatora. Masa i odsprzęganie mają znaczenie, bo szum zasilania może modulować punkt pracy aktywnego elementu.
Oscylator — co trzeba zapamiętać?
Oscylator to aktywny układ generujący okresowy sygnał dzięki sprzężeniu zwrotnemu, rezonansowi, opóźnieniu albo ujemnej rezystancji. Do poprawnej pracy potrzebuje nie tylko częstotliwości rezonansowej, ale też zapasu startu, kompensacji strat, stabilizacji amplitudy i kontroli wpływu zasilania, obciążenia oraz PCB. W prostych układach wystarczy znać częstotliwość, ale przy kwarcach, mikrokontrolerach, RF, PLL i przetwornikach trzeba patrzeć na C_L, ESR, drive level, ppm, startup time, jitter i phase noise.
Źródła i materiały
- STMicroelectronics – AN2867: Guidelines for oscillator design on STM8 and STM32
- Microchip – AN826: Crystal Oscillator Basics and Crystal Selection
- Silicon Labs – AN0016.0: Oscillator Design Considerations
- Texas Instruments – Crystal Oscillator and Crystal Selection for Wireless MCUs
- Analog Devices – MT-008: Converting Oscillator Phase Noise to Time Jitter
- Calosso, Rubiola – Phase Noise and Jitter in Digital Electronics